 量子哈希
量子哈希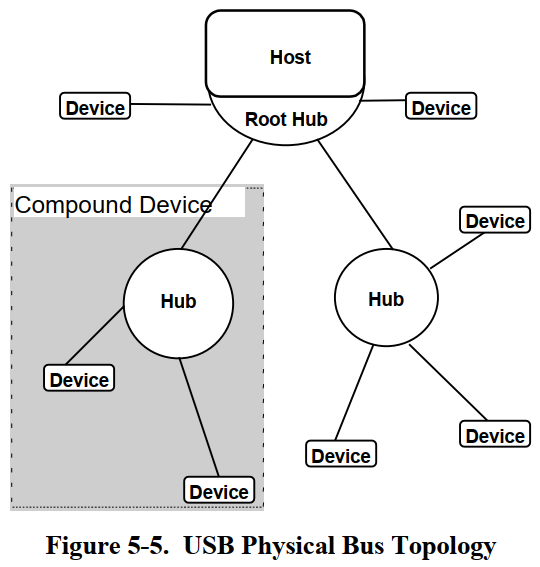
-
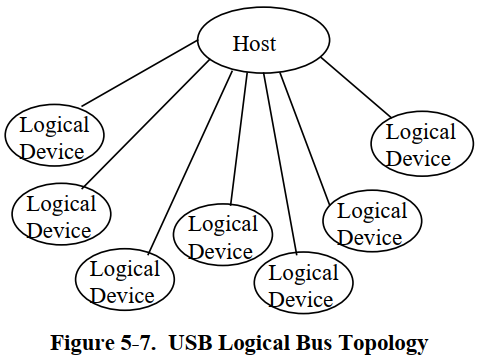
在软件开发过程中,我们可以忽略 Hub 的存在,简化硬件拓扑图如下:一个物理设备里面可能有多个逻辑设备,Host 可以外接多个逻辑设备,硬件拓扑图如下:
-
要理解协议层、理解数据如何传输,带着这几个问题去学习:提前罗列出来:
数据阶段:结果如何?有握手包
2.1 字节/位传输顺序:先传输最低位(LSB)。描述数据时按照传输顺序从左到右列出来。
2.2 SYNC 域:Host 发出 SOP 信号后,就会发出 SYNC 信号:它是一系列的、最大传输频率的脉冲,接收方使用它来同步数据。对于低速/全速设备,SYNC 信号是 8 位数据(从做到右是 00000001);对于高速设备,SYNC 信号是 32 位数据(从左到右是00000000000000000000000000000001)。使用 NRZI 编码时,前面每个 “0” 都对应一个跳变。在很多文档里,把 SOP 和 SYNC 统一称为”SYNC”,它的意思是 “SYNC” 中含有 “SOP”。
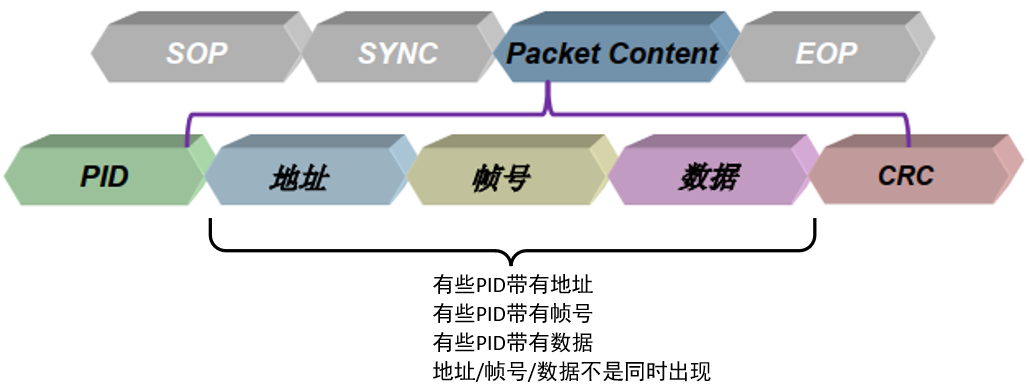
2.3 包格式
USB 总线上传输的数据以包为单位。USB 包里含有哪些内容(“域”)?
帧号、数据等跟 PID 相关的内容
CRC 校验码
发起一次完整的传输,可能涉及多个包。那么,第 1 个包里含有【设备地址、端点号】,后续的包就没必要包含设备地址、端点号。
2.3.1 PID 域
注意:所有的 USB 文档提到的”输入”、”输出”,都是基于 Host 的角度,”输出”表示从 Host 输出到设备,”输入”表示 Host 从设备得到数据。
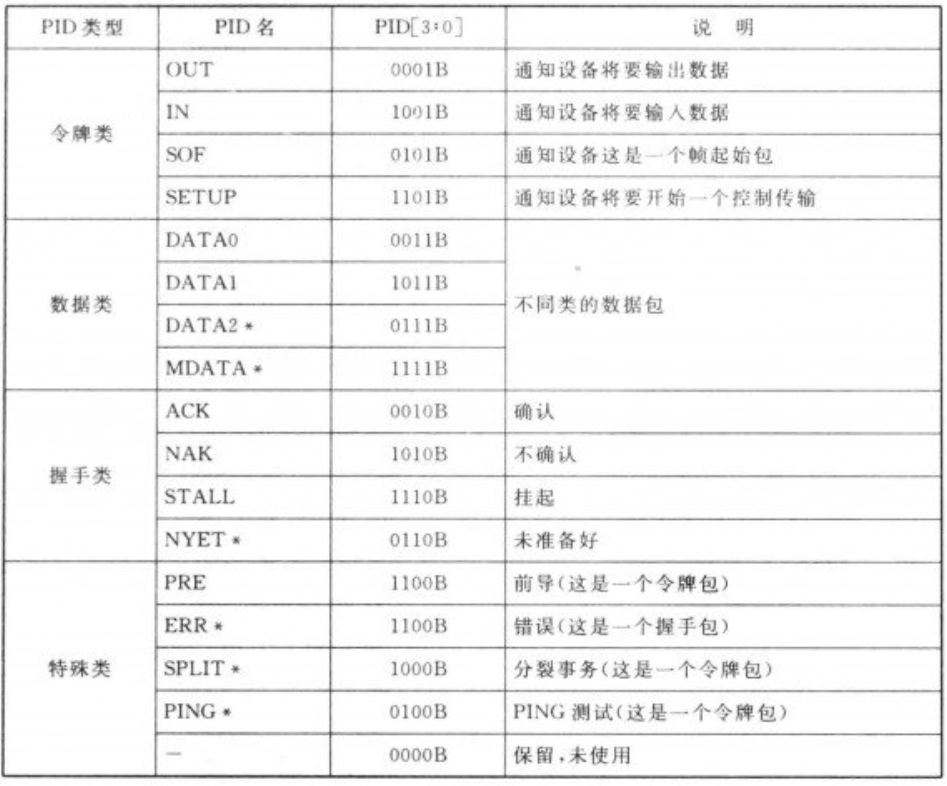
有哪些 USB 包?根据包数据里的 PID 的 bit1, bit0 可以分为4类:PID 有 4 位,使用 bit1,bit0 确定分类,使用 bit3,bit2 进一步细分。如下表(来自《圈圈教你玩USB》)所示:
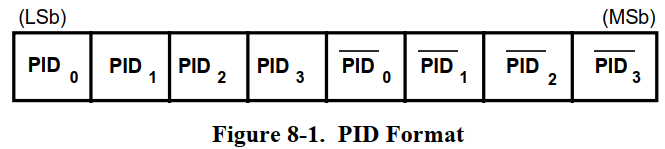
在 USB 包中,PID 域使用 8 位来表示,格式如下:前 4 位表示 PID,后 4 位是对应位的取反。接收方发现后 4 位不是前 4 位的取反的话,就认为发生了错误。
2.3.2 令牌包(Token)
令牌类的 PID,起”通知作用”,通知谁?SOF 令牌包被用来通知所有设备,OUT/IN/SETUP 令牌包被用来通知某个设备。
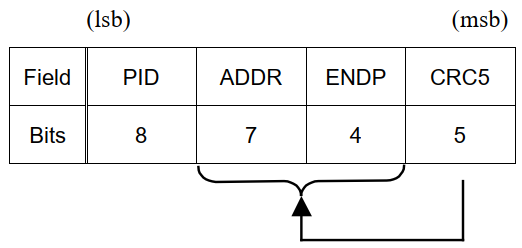
对于 OUT、IN、SETUP 令牌包,它们都是要通知到具体的设备,格式如下:
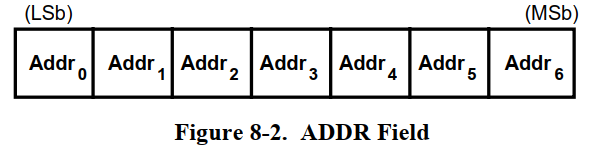
USB 设备的地址有 7 位,格式如下:
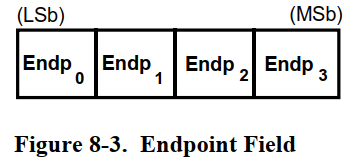
USB 设备的端点号有 4 位,格式如下:
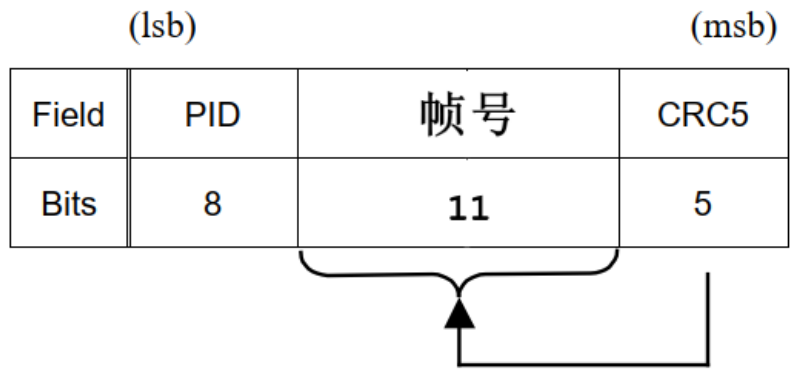
对于 SOF 包,英文名为”Start-of-Frame marker and frame number”。对于 USB 全速设备,Host 每 1ms 产生一个帧;对于高速设备,每 125us 产生一个微帧,1 帧里有 8 个微帧。Host 会对当前帧号进行累加计数,在每帧或每微帧开始时,通过 SOF 令牌包发送帧号。对于高速设备,每 1 毫秒里有 8 个微帧,这 8 个微帧的帧号是一样的,每 125us 发送一个 SOF 令牌包。SOF 令牌包格式如下:
2.3.3 数据包
Host 使用 OUT、IN、SETUP 来通知设备:我要传输数据了。数据通过”数据包”进行传输。
数据包也有 4 种类型:DATA0、DATA1、DATA2、MDATA。其中 DATA2、MDATA 在高速设备中使用。对软件开发人员来说,我们暂时仅需了解 DATA0、DATA1。
为什么要引入 DATA0、DATA1 这些不同类型的数据包?【为了纠错】。
Host 和设备都会维护自己的数据包切换机制,当数据包成功发送或者接收时,数据包类型切换。当检测到对方使用的数据包类型不对时,USB 系统认为发生了错误。
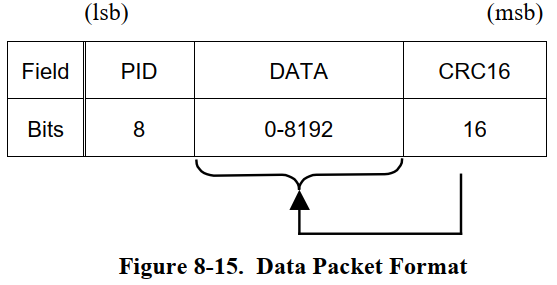
比如:数据包大小在不同传输模式下有不同规定,格式如下:
最大数据有效载荷:低速设备为 8 字节,全速设备是 1023 字节,高速设备为 1024 字节。
2.3.4 握手包
握手包有 4 类:ACK、NAK、STALL、NYET
2.4 传输细节
2.4.1 传输(Transfer)和事务(Transaction)
USB 传输的基本单位是包(Packet),包的类型由 PID 表示。一个单纯的包,是无法传输完整的数据。
为什么?比如想输出数据,可以发出 OUT 令牌包,OUT 令牌包可以指定目的地。但是数据如何传输呢?还需要发出 DATA0 或 DATA1 数据包。设备收到数据后,还要回复一个 ACK 握手包。
所以,完整的数据传输,需要涉及多个包:令牌包、数据包、握手包。这个【完整的数据传输过程,被称为事务(Transaction)】
有些事务需要握手包,有些事务不需要握手包,有些事务可以传输很大的数据,有些事务只能传输小量数据。
有四类事务:
有四类传输(Transfer):
暂时记住这个关系:
2.4.2 过程(stage)和阶段(phase)
事务由多个包组成,比如 Host 要发送数据给设备,这就会涉及很多个包:
这个完整的事务涉及 3 个包(Packet),分为 3 个阶段(Phase):
事务由包组成,这些包分别处于 3 个阶段(phase):令牌阶段,数据阶段,握手阶段。
对于批量传输、中断传输、实时传输,它们分别由一个事务组成,不再细分为若干个过程。
【但是】控制传输由多个事务组成,这些事务分别处于 3 个过程:建立过程(stage)、数据过程(stage)、状态过程(stage)。
总结起来就是:
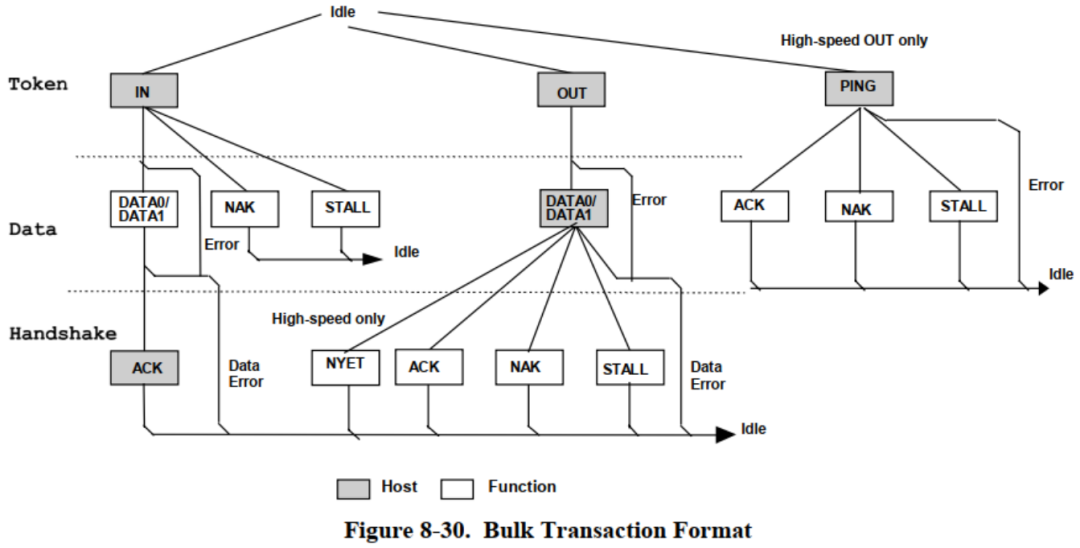
2.4.3 批量传输
批量传输用批量事务来实现,用于传输大量的数据,数据的正确性有保证,时效没有保证。
批量事务由 3 个阶段(phase)组成:令牌阶段、数据阶段、握手阶段。每个阶段都是一个完整的包,含有 SOP、SYNC、PID、EOP。
2.4.4 中断传输
中断传输用中断事务来实现,用于传输小量的、周期性的数据,数据的正确性和时效都有保证。
中断事务由 3 个阶段(phase)组成:令牌阶段、数据阶段、握手阶段。每个阶段都是一个完整的包,含有 SOP、SYNC、PID、EOP。
中断事务跟批量事务非常类似,Host 使用它来周期性地读数据、写数据。
以鼠标为例,我们需要及时获得鼠标的数据,不及时的话你会感觉鼠标很迟钝。但是 USB 协议中并没有中断功能,它使用”周期性的读、写”来实现及时性。具体过程如下:
中断事务的【优先级】比批量事务更高,它要求实时性,而批量事务不要求实时性。
2.4.5 实时传输
实时传输用实时事务来实现,用于传输实时数据,对数据的正确性没有要求。
实时事务由 2 个阶段(phase)组成:令牌阶段、数据阶段。每个阶段都是一个完整的包,含有 SOP、SYNC、PID、EOP。
实时事务不需要握手阶段,一个示例的场景是:为了传输摄像头的实时数据,偶尔的数据错误是可以忍受的,大不了出现短暂的花屏。如果为了解决花屏而重传数据,那就会导致后续画面被推迟,实时性无法得到保证。
2.4.6 控制传输
在使用批量传输时,使用 IN 令牌包或 OUT 令牌包表示数据传输方向。
控制传输的令牌包永远是 SETUP,怎么分辨是读数据,还是写数据?发出 SETUP 令牌包后,还要发出 DATA0 数据包,根据数据的内容来确定后续是读数据,还是写数据。这个过程称为”建立事务”(SETUP Transaction)
但是控制传输由多个事务组成,这些事务分别处于 3 个过程:建立过程(stage)、数据过程(stage)、状态过程(stage)。
状态过程(stage),使用批量事务:
上图中的每一个方框,都是一个完整的事务,含有:Token Packet、Data Packet、Handshake Packet。
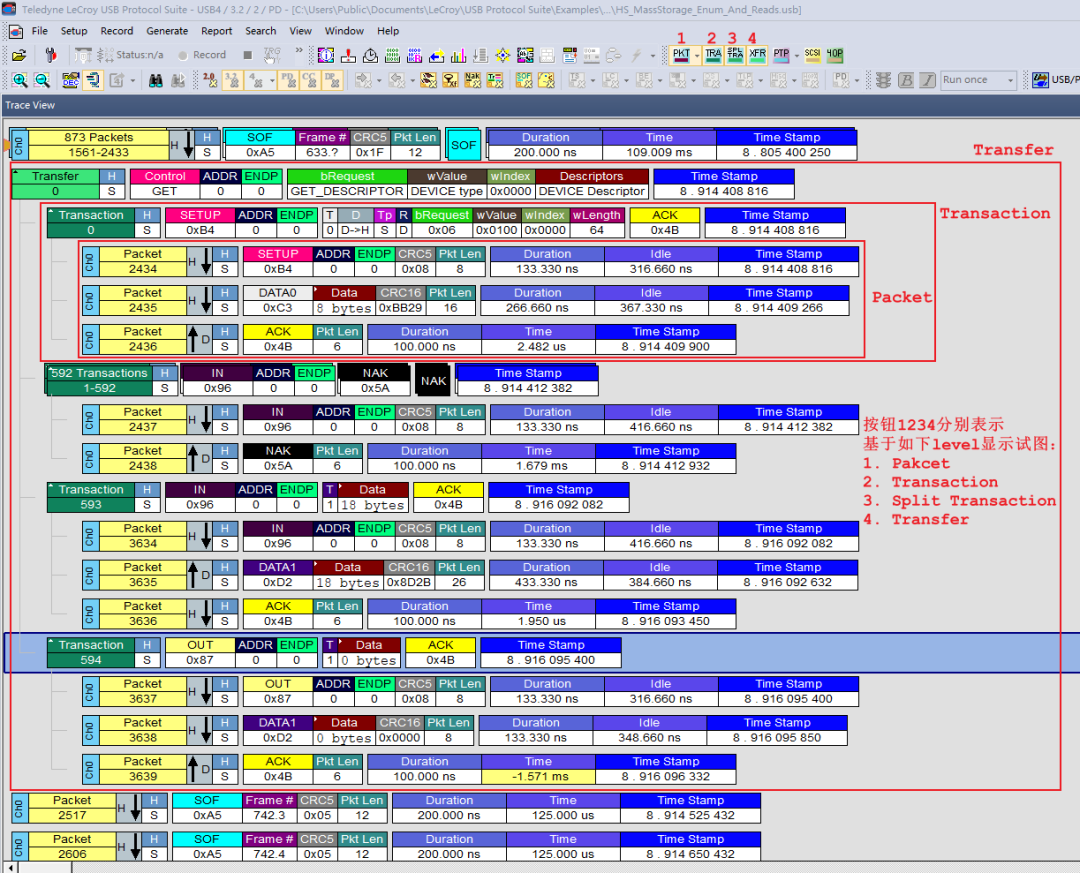
- 使用工具体验数据格式
LeCroy(力科)成立于 1964 年,是一家专业生产示波器厂家。旗下生产有数字示波器、SDA 系列数字示波器、混合信号示波器、模块化仪器、任意波形发生器。可以在搜索引擎里搜”usbprotocolsuite” 下载 USB 抓包工具。
安装”usbprotocolsuite”后,可以在文档目录里找打很多示程序(后缀名为usb):










![奶瓶破解beini官方版下载[网页辅助]-量子哈希](https://www.ccwifi.cc/blogs/wp-content/uploads/2024/03/1710700827525_1.jpg)

